 |
地址:无锡市贡湖大道(原苏锡路)黄金湾工业区 |
 |
咨询热线:13812295630 |
机器人是高度柔性加工体系,所以要求激光器必定要有高度的柔性,现在都挑选可光纤传输的激光器。智能化激光加工机器人主要由以下几大部分组成:

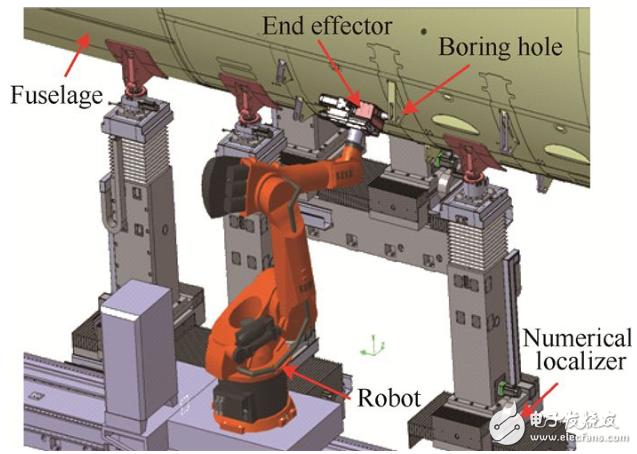
从高功率激光器宣布的激光,经光纤耦合传输到激光光束改换光学体系,光束通过整形聚集后进入激光加工头。依据用处不同(切开、焊接、熔覆)选不一样的激光加工头,配用不同的资料进给体系(高压气体、送丝机、送粉器)。激光加工头装于六自由度机器人本体手臂结尾,如图2所示。激光加工头的运动轨道和激光加工参数是由机器人数字操控办理体系供给指令进行的。先由激光加工操作人员在机器人示教盒上进行示教编程或在核算机上进行离线编程。资料进给体系将资料(高压气体、金属丝、金属粉末)与激光同步输入到激光加工头,高功率激光与进给资料同步效果完结加工使命。机器视觉体系对加工区检测,检测信号反应至机器人操控办理体系,以此来完成工艺流程的当令操控。
激光加工机器人是光机电一体化的杂乱体系,能够按机械结构、用处、操控等进行许多种分类。
按机器人机械结构分,现在激光加工机器人主要有两种类型:结构式机器人和关节式机器人。
结构式激光加工机器人:这种机器人主要由三坐标高精度龙门结构、数字操控办理体系和驱动体系、高功率激光器、传输光纤、三自由度旋转光束头和检测体系组成。这种机器人具有加工规模大,加工精度高级特色。合适各种编程和体系集成,至少可完成六坐标加工,即3D直线运动坐标(X,Y,Z)和3D翻滚坐标(,,)。一切坐标轴的驱动均选用沟通伺服电机、直线翻滚导轨、滚珠丝杠螺母副等。这种机器人可靠性高,但造价也高。