 |
地址:无锡市贡湖大道(原苏锡路)黄金湾工业区 |
 |
咨询热线:13812295630 |
雷达是一种探测系统,它使用无线电波来确定目标的距离、角度或速度,它可拿来探测飞机、船舶、航天飞行器、制导导弹、或者机动车辆,甚至能够预测天气的形成和探测地形。
雷达系统包括一个在无线电或微波领域产生电磁波的发射机,一个发射天线,一个接收天线(通常同一天线用于发射和接收),以及一个接收机和一个处理器,以确定物体的属性。来自发射机的无线电波(脉冲或连续的)被物体反射,然后返回至接收机,给出物体的位置和速度信息。
高科技雷达系统与数字信号处理(DSP)和机器学习(ML)集成到人工智能(AI)中,结合深度学习(DL),能够从非常高的噪声水平中提取有用的信息。雷达是无人驾驶系统主要使用的一项关键技术,除此以外还有声纳和其他传感器。其他类似于雷达的系统利用了电磁波谱的其他部分。
一个例子是光探测和测距(激光雷达),它主要使用来自激光的红外光而不是无线电波,有一些文章或书籍称激光雷达为LADAR,它们都意味着相同的技术。随着无人驾驶汽车的出现,雷达有望协助自动化平台监控其环境,从而防止不必要的事故发生。
激光雷达的探测机制是基于测量方法,即用激光照射目标,用传感器测量反射光来测量到目标的距离。激光返回时间和波长的差异可拿来形成目标的数字3D表示。激光雷达这一个名字,现在被用作光探测和测距(有时是光成像、探测和测距)的首字母缩写,最初是光和雷达的合成词或组合。
激光雷达有时被称为3D激光扫描,是3D扫描和激光扫描的特殊组合。它有地面、空中和移动方面的应用。如图1.2所示,在星火光学范围内用于激光雷达和激光制导星实验的光辐射频率加源(FASOR)被调谐到钠D2a线,用于激发上层大气中的钠原子。
激光雷达通常使用紫外线(UV)、可见光或近红外(IR)光来成像物体。它可以瞄准许多各种不同的材料,包括非金属物体,岩石,雨,化合物,气溶胶,云,甚至单分子。狭窄的激光束可以以非常高的分辨率映射物理特征;例如,一架飞机可以绘制30摄氏度(12英寸)分辨率或更高分辨率的地形地图。
在机载激光雷达的例子中,它仅仅是机载激光扫描,一种激光,在飞行过程中连接到飞机上,创建3D点云模型的景观。这是目前创建数字高程模型最详细和准确的方法,可以取代摄影测量。与摄影测量相比,一个主要的优势是能够从点云模型中过滤掉植被的反射,从而创建一个数字地形模型,该模型代表被树木隐藏的地面,如河流、路径、文化遗址等。
在机载激光雷达的类别中,有时在高空和低空应用之间有区别,但主要的区别是在较高海拔获得的数据的精度和点密度都有所降低。见图1.3。在图1.3中,我们观察的是机载激光雷达进行扫描产生测点平行线的原理图,虽然也有其他的扫描模式方法,但这是最常见的一种。
与大多数其他技术相比,使用激光雷达收集高程数据有几个优点。其中主要的是具有更高的分辨率,厘米精度,和能对森林地形进行地面检测。
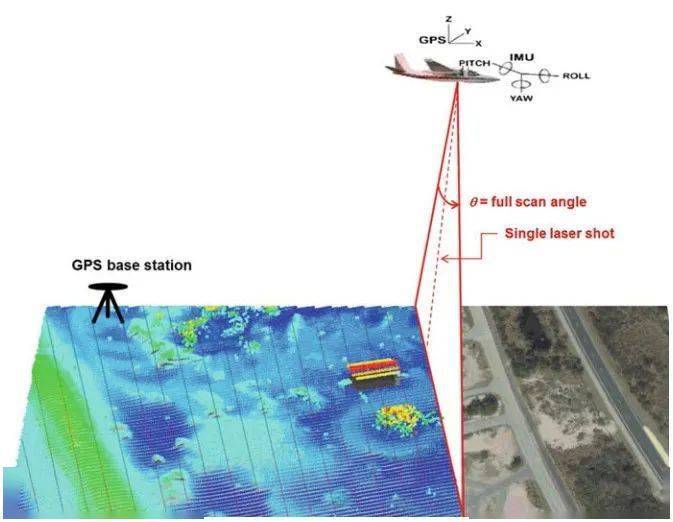
激光雷达慢慢的变成了在景观、浅水区和项目地点收集非常密集和准确的高程数据的一种既定方法。这种主动遥感技术类似于雷达,但使用的是激光脉冲而不是无线电波。激光雷达通常是在“飞行状态下”或从飞机上收集的,这样它能够迅速收集大面积的数据点(如图1.3)。机载激光雷达也能够适用于创建浅水区的水深模型。返回搜狐,查看更加多